robotika - kompas
http://svetelektro.com/clanky/amaterska-robotika-cast-3-509.html
Amatérska robotika - časť 3.
Kategória: Návody a teória | 11.07.2012 | Autor: elektonik737

Senzorický subsystém robota, popis a funkcia jednotlivých senzorov
interné – poskytujú robotu informácie o jeho subsystémoch (stav batérie, teplota, monitorovanie komunikácie, meranie rýchlosti otáčok, atď).
externé – slúžia na získavanie informácií o okolí robota (najvýznamnejšie sú senzory , ktoré môžu slúžiť na jeho navigáciu).
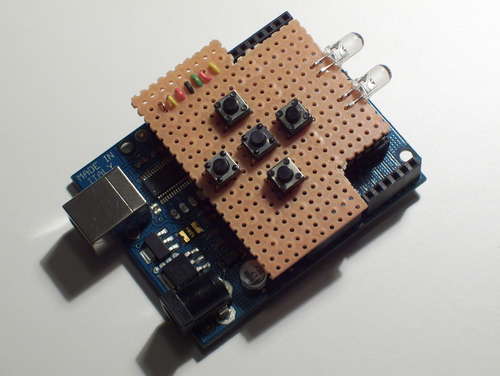
Taktilné senzory
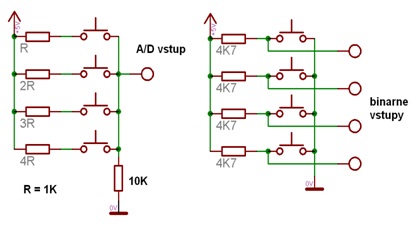
Najjednoduchšie senzory - ak robot narazí do prekážky, zopne/rozopne elektrický obvod, zmení sa jeho logická úroveň a ďalej sa informácia spracováva. Každý takýto senzor musí byť pripojený zvlášť. Ak nie je dostatok binárnych vstupov, je možné realizovať zapojenie s multiplexorom prípadne s A/D prevodníkom. Taktiež sa používajú ako tlačidla (možnosť konfigurácie softwaru).
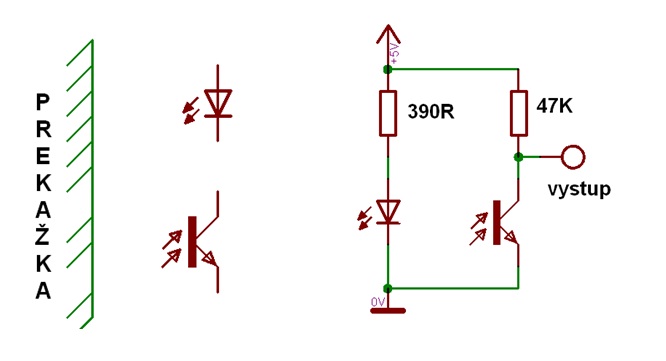
Detektor prekážok pre blízke okolie
Senzory väčšinou používajú súčiastky citlivé na IR svetlo s vlnovou dĺžkou okolo 880nm tesne pod hranicou viditeľného svetla. Princíp detekcie predmetov je jednoduchý. Vysiela sa IR svetlo do okolia a meria sa jeho odraz od prekážky. Jednoduchý senzor je IR fototranzistor, ktorý prejde do vodivého stavu (zmení binárny výstup senzora) pri osvetlení IR svetlom.
Častejšie ako tranzistor sa používajú špecializované prijímač s integrovaným demodulátorom od firiem Siemens a Sharp, napríklad: GP1U52X, SFH 506, SFH 5110-36 alebo SFH 5110-38,.. . Posledné dvojčíslie pri typoch SFH 5110 znamená frekvenciu v kHz, na ktorú je senzor najviac citlivý. Jedinou podmienkou pre použitie týchto senzorov je modulácia (blikanie) svetla IR LED. Hodnota frekvencie modulácie by mala byť čo najbližšie k hodnote udanej na prijímači pre maximálnu citlivosť. Moduláciu môžeme realizovať pomocou časovača NE555 zapojeného ako oscilátor alebo obvodom LM393. Častejšia je softvérová modulácia pomocou mikropočítača (MCU).

Ak senzory umiestnime na čelo robota a pridáme ešte jednu IR LED, môžeme rozpoznávať, či je prekážka vpravo alebo vľavo.
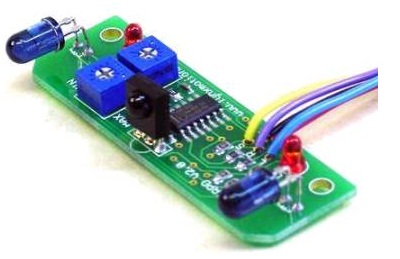
Snímač farby – reflexný optočlen
Takýto snímač dokáže rozlíšiť farbu podkladu pod robotom (biela/čierna). Vďaka týmto snímačom dokáže robot sledovať napríklad čiaru, alebo počítať biele značky na tmavých kolesách (meranie rýchlosti otáčania, ).


Ultrazvukový snímač
Princíp merania vzdialenosti k prekážke je založený na princípe merania doby medzi vy¬slaním akustického signálu a prijatím odrazeného akustického signálu - echa.

Najbežnejšia frekvencia akustického signálu sú hodnoty nad 40 kHz. Takéto snímače sú označované ako ultrazvukové sonary, prípadne len sonary. Vďaka relatívne nízkej rých¬losti zvuku (vo vzduchu) je doba medzi vysielaním a príjmom signálu výrazne vyššia než u radarových, laserových a IR snímačov. Preto možno dosiahnuť relatívne vysokej presnosti merania i bez extrémnych nárokov na vyhodnocovacie obvody. Vďaka tomu je ich cena pomerne nízka, ale perióda merania je dlhšia (0,1 s). Nevýhodou je vysoké tlmenie ultrazvukového signálu, čo obmedzuje praktický dosah na desiatky metrov, bežne do cca 10m. Vzhľadom k pomere širokému rozptylu tohto signálu nie je možno prekážku detegovať celkom presne čo sa týka jej uhlovej pozície. Ďalším problémom býva od¬raz ultrazvukového signálu, ktorý dopadá na hladký povrch prekážky pod ostrým uh¬lom (nazýva sa zrkadlový odraz).

V takomto prípade sa signál odrazí ďalej smerom od sonaru a spätne sa odrazí až od vzdialenejšej prekážky. Sonarom je potom detegovaná vzdialenejšia prekážka. Preto by malo byť časové oneskorenie medzi jednotlivými meraniami väčšie ako oneskorenie odpovedajúce maximálnemu dosahu sonaru. Nezanedbateľný je i vplyv teploty vzduchu na rýchlosť šírenia zvuku. Pre teplotu t = 0°C; v = 331 m/s a pre t = 25 °C; v = 343 m/s.
Snímač napätia akumulátora
Pri návrhu senzorického subsystému mobilného robota nesmie chýbať snímač napätia akumulátorov (voltmeter). Snímač je realizovaný ako delič napätia z dvoch rezistorov, ktoré sú pripojené priamo na batériu a stred deliča je privedený do A/D prevodníka mikropočítača.
Snímač natočenia robota - kompas
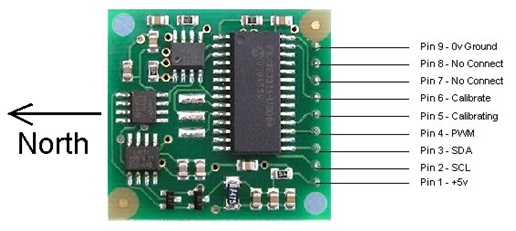
Často používaným je kompas CMPS03, vďaka svojej nižšej cene a presnosti 3 až 4° s krokom 0,1°. Spotreba modulu je 15mA/5V. Kompas dokáže komunikovať s riadiacim subsystémom po zbernici I2C, alebo pomocou PWM modulácie. PWM signál je modulovaný tak, že šírka kladného pulzu (log. 1) je úmerná azimutu v rozsahu 1ms (1°) a 36,99ms (359,9°), inými slovami 100us/° s ofsetom 1ms. Šírka pulzu v log. 0 je 65ms, takže dĺžka celej periódy je 65ms + šírka kladného pulzu t.j. 66ms – 101,99ms.
Senzorický subsystém
Senzory môžu byť:interné – poskytujú robotu informácie o jeho subsystémoch (stav batérie, teplota, monitorovanie komunikácie, meranie rýchlosti otáčok, atď).
externé – slúžia na získavanie informácií o okolí robota (najvýznamnejšie sú senzory , ktoré môžu slúžiť na jeho navigáciu).
Taktilné senzory
Najjednoduchšie senzory - ak robot narazí do prekážky, zopne/rozopne elektrický obvod, zmení sa jeho logická úroveň a ďalej sa informácia spracováva. Každý takýto senzor musí byť pripojený zvlášť. Ak nie je dostatok binárnych vstupov, je možné realizovať zapojenie s multiplexorom prípadne s A/D prevodníkom. Taktiež sa používajú ako tlačidla (možnosť konfigurácie softwaru).
Detektor prekážok pre blízke okolie
Senzory väčšinou používajú súčiastky citlivé na IR svetlo s vlnovou dĺžkou okolo 880nm tesne pod hranicou viditeľného svetla. Princíp detekcie predmetov je jednoduchý. Vysiela sa IR svetlo do okolia a meria sa jeho odraz od prekážky. Jednoduchý senzor je IR fototranzistor, ktorý prejde do vodivého stavu (zmení binárny výstup senzora) pri osvetlení IR svetlom.
Častejšie ako tranzistor sa používajú špecializované prijímač s integrovaným demodulátorom od firiem Siemens a Sharp, napríklad: GP1U52X, SFH 506, SFH 5110-36 alebo SFH 5110-38,.. . Posledné dvojčíslie pri typoch SFH 5110 znamená frekvenciu v kHz, na ktorú je senzor najviac citlivý. Jedinou podmienkou pre použitie týchto senzorov je modulácia (blikanie) svetla IR LED. Hodnota frekvencie modulácie by mala byť čo najbližšie k hodnote udanej na prijímači pre maximálnu citlivosť. Moduláciu môžeme realizovať pomocou časovača NE555 zapojeného ako oscilátor alebo obvodom LM393. Častejšia je softvérová modulácia pomocou mikropočítača (MCU).
Ak senzory umiestnime na čelo robota a pridáme ešte jednu IR LED, môžeme rozpoznávať, či je prekážka vpravo alebo vľavo.
Snímač farby – reflexný optočlen
Takýto snímač dokáže rozlíšiť farbu podkladu pod robotom (biela/čierna). Vďaka týmto snímačom dokáže robot sledovať napríklad čiaru, alebo počítať biele značky na tmavých kolesách (meranie rýchlosti otáčania, ).
Ultrazvukový snímač
Princíp merania vzdialenosti k prekážke je založený na princípe merania doby medzi vy¬slaním akustického signálu a prijatím odrazeného akustického signálu - echa.
Najbežnejšia frekvencia akustického signálu sú hodnoty nad 40 kHz. Takéto snímače sú označované ako ultrazvukové sonary, prípadne len sonary. Vďaka relatívne nízkej rých¬losti zvuku (vo vzduchu) je doba medzi vysielaním a príjmom signálu výrazne vyššia než u radarových, laserových a IR snímačov. Preto možno dosiahnuť relatívne vysokej presnosti merania i bez extrémnych nárokov na vyhodnocovacie obvody. Vďaka tomu je ich cena pomerne nízka, ale perióda merania je dlhšia (0,1 s). Nevýhodou je vysoké tlmenie ultrazvukového signálu, čo obmedzuje praktický dosah na desiatky metrov, bežne do cca 10m. Vzhľadom k pomere širokému rozptylu tohto signálu nie je možno prekážku detegovať celkom presne čo sa týka jej uhlovej pozície. Ďalším problémom býva od¬raz ultrazvukového signálu, ktorý dopadá na hladký povrch prekážky pod ostrým uh¬lom (nazýva sa zrkadlový odraz).
V takomto prípade sa signál odrazí ďalej smerom od sonaru a spätne sa odrazí až od vzdialenejšej prekážky. Sonarom je potom detegovaná vzdialenejšia prekážka. Preto by malo byť časové oneskorenie medzi jednotlivými meraniami väčšie ako oneskorenie odpovedajúce maximálnemu dosahu sonaru. Nezanedbateľný je i vplyv teploty vzduchu na rýchlosť šírenia zvuku. Pre teplotu t = 0°C; v = 331 m/s a pre t = 25 °C; v = 343 m/s.
Snímač napätia akumulátora
Pri návrhu senzorického subsystému mobilného robota nesmie chýbať snímač napätia akumulátorov (voltmeter). Snímač je realizovaný ako delič napätia z dvoch rezistorov, ktoré sú pripojené priamo na batériu a stred deliča je privedený do A/D prevodníka mikropočítača.
Snímač natočenia robota - kompas
Často používaným je kompas CMPS03, vďaka svojej nižšej cene a presnosti 3 až 4° s krokom 0,1°. Spotreba modulu je 15mA/5V. Kompas dokáže komunikovať s riadiacim subsystémom po zbernici I2C, alebo pomocou PWM modulácie. PWM signál je modulovaný tak, že šírka kladného pulzu (log. 1) je úmerná azimutu v rozsahu 1ms (1°) a 36,99ms (359,9°), inými slovami 100us/° s ofsetom 1ms. Šírka pulzu v log. 0 je 65ms, takže dĺžka celej periódy je 65ms + šírka kladného pulzu t.j. 66ms – 101,99ms.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}